

Build a UTB18 for Competition
Who This is For
I’m a big fan of the Axial Capra UTB18. It’s been seemingly built for durable fun in a small size, but did you know it also has all the right geometry and dimensions to perfectly fit with WRCCA Mini 1.9 class specs? This isn’t by accident!
If you’re someone wanting to run in WRCCA Mini 1.9 class and you’re looking for something a bit different and like the idea of using your Axial UTB18 as a base, you’ve come to the right page! Follow this outline and you’ll end up with a competition-proven Mini chassis capable of helping you win your event.
Affiliate Note
This article necessarily has links to all the products I’m using for my rig. I’ve used affiliate links wherever I can because it helps support my work without costing you anything more – that’s a no-brainer! These recommendations are nonetheless legit and they’re the gear I’m using. I want to help you build your rig, and we’re going to do it honestly and with transparency.
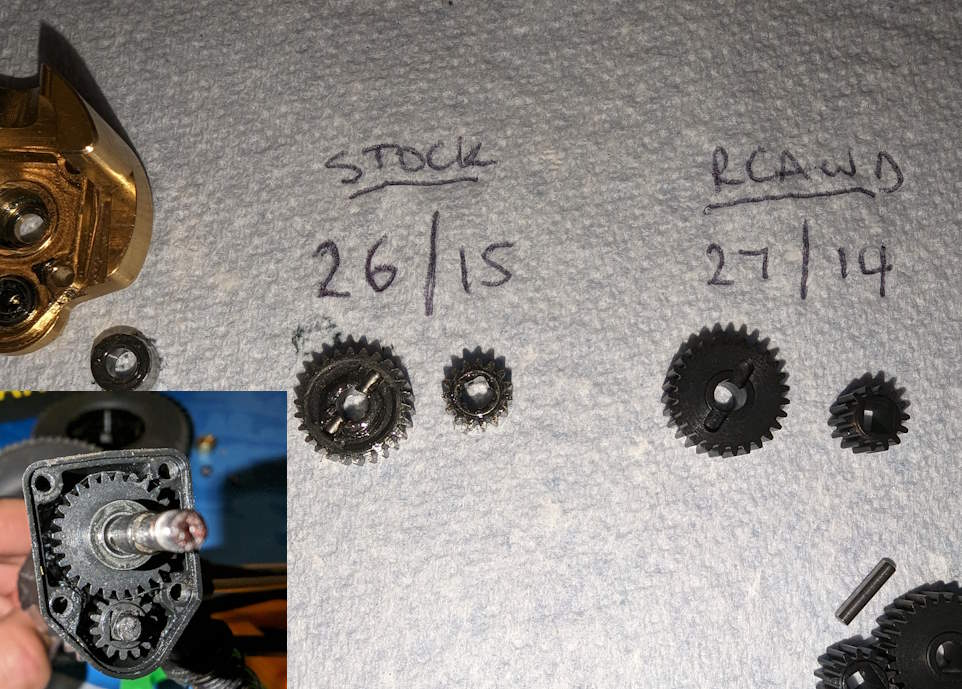
Also, I’ve worked with RCAWD to develop the portal gears for the UTB18. I’ve linked directly to their storefront for all the bits I’m running.

Background
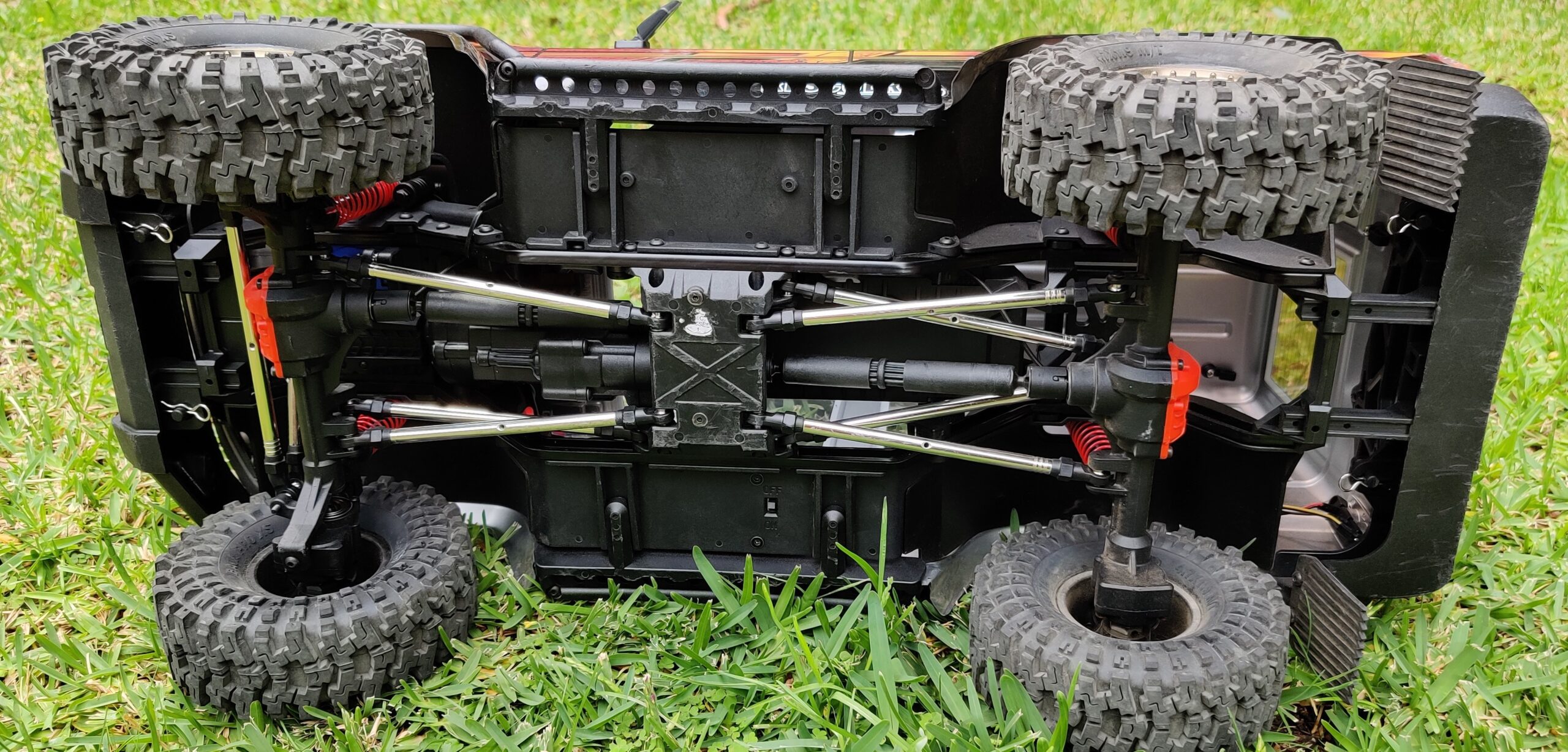
After we got our first Bambu P1S printers, my friend Harry T. and I got to talking. We both had Axial UTB18 ‘Baby Capras’ and both participated in local RC crawling comps. We set ourselves a challenge to each design a chassis for the UTB18 to improve its high center of gravity and its overall crawling ability.
For my design, I also decided to make it something people could download and build themselves. So, one of the parameters I set myself was to retain the original suspension, links and drive shafts, in order to minimise the outlay and complexity of the build.
Testing
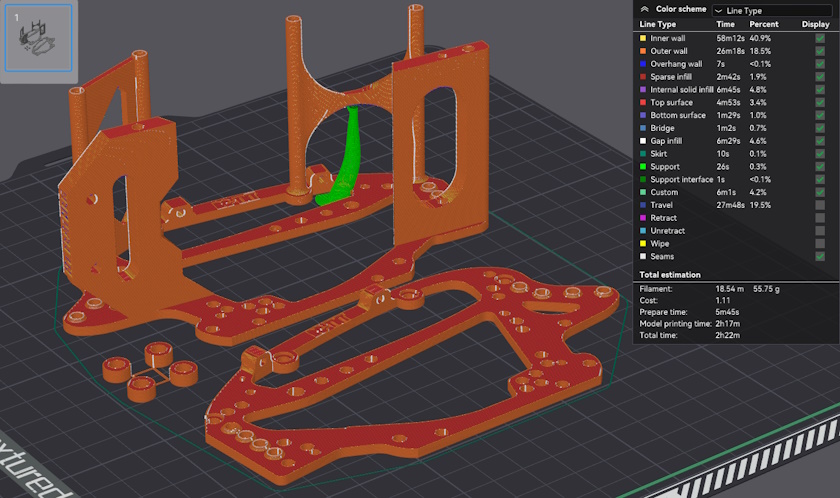
I printed several iterations over that day and sent them to Harry. He tested them and reported back with his opinions. I’d modify the design, then send it back to him for more testing. The next day, we had a good working prototype. To honour Harry’s help, I named my chassis after him: the HT Feather.
I’ve since shared the story of its build on my YouTube channel and then driven it to second place at the 2024 ECCF, which is something of a Nationals event for Australian rock crawling. The chassis moves well, is easy to build, quite durable (in PLA+) and works amazingly well. I watched it stably out-crawl far more expensive rigs during the event and it was very satisfying to drive.
Since then, folks have been messaging me with something like “How do I build one like yours? Give me all the details, not just the chassis!”. This article is an answer to them, and also to you, if you’re interested in building your own budget beastie. Let’s go!

UTB18 Videos
If you’d like more background on the development of this machine, check out my Mini class videos on RC-TNT:
- My original Mini 1.9 Comp Rig: https://youtu.be/NkMp5FG-LlQ
- UTB18 Review: https://youtu.be/EJZytzGkbBs
- Upgrading the motor & ESC: https://youtu.be/e-ILpmQpH7E
- Replacing my Mini 1.9 with UTB18: https://youtu.be/qTZ1Ie6_u7Q
- My bolt-on comp chassis, free to download! https://youtu.be/plJ2p2RE-F4
- Getting the tires right: https://youtu.be/OziL7NPY4SU
- RCAWD Wheels and final tweaks: https://youtu.be/tgjrdzU7ySQ
- National 2nd Place and exploring suspension: https://youtu.be/isiTjDfnzd4

The Parts
MODEL & CHASSIS
First, you’ll need an Axial Capra UTB18, of course! https://amzn.to/3X5S0lg
CHASSIS: Also, you’ll want to get my HT Feather chassis downloaded and printed. Full instructions are contained in the file and also on the download page. https://rc-tnt.com/project/rc-tnt-ht-feather-chassis-for-utb18-v2-36/
HARDWARE: a pack like this is handy: https://amzn.to/45acRWv. Use the button head screws in the prescribed lengths (8x of each 8mm and 12mm, plus the extra 4x 12mm for the newer rear piece).
ELECTRONICS
RADIO: This guide assumed you’ll use your own radio system of choice. I’m running a FlySky GT5 (http://asiate.es/aff?l=150074&i=76070) with a budget and light-weight FS-A3 receiver: https://amzn.to/3R9Lbeu
SERVO: I ran this servo for 3 comp seasons and it was perfect: jx Servo CLS5830HV V2: http://asiate.es/aff?l=165766&i=76070
I’ve recently upgraded to the jx BLS-HV7132MG brushless model for some more speed: http://asiate.es/aff?l=155209&i=76070
MOTOR: With motors, you have a few choices. I really like this cheap and cheerful Surpass Hobby 1300kv Outrunner: https://amzn.to/3V87in2
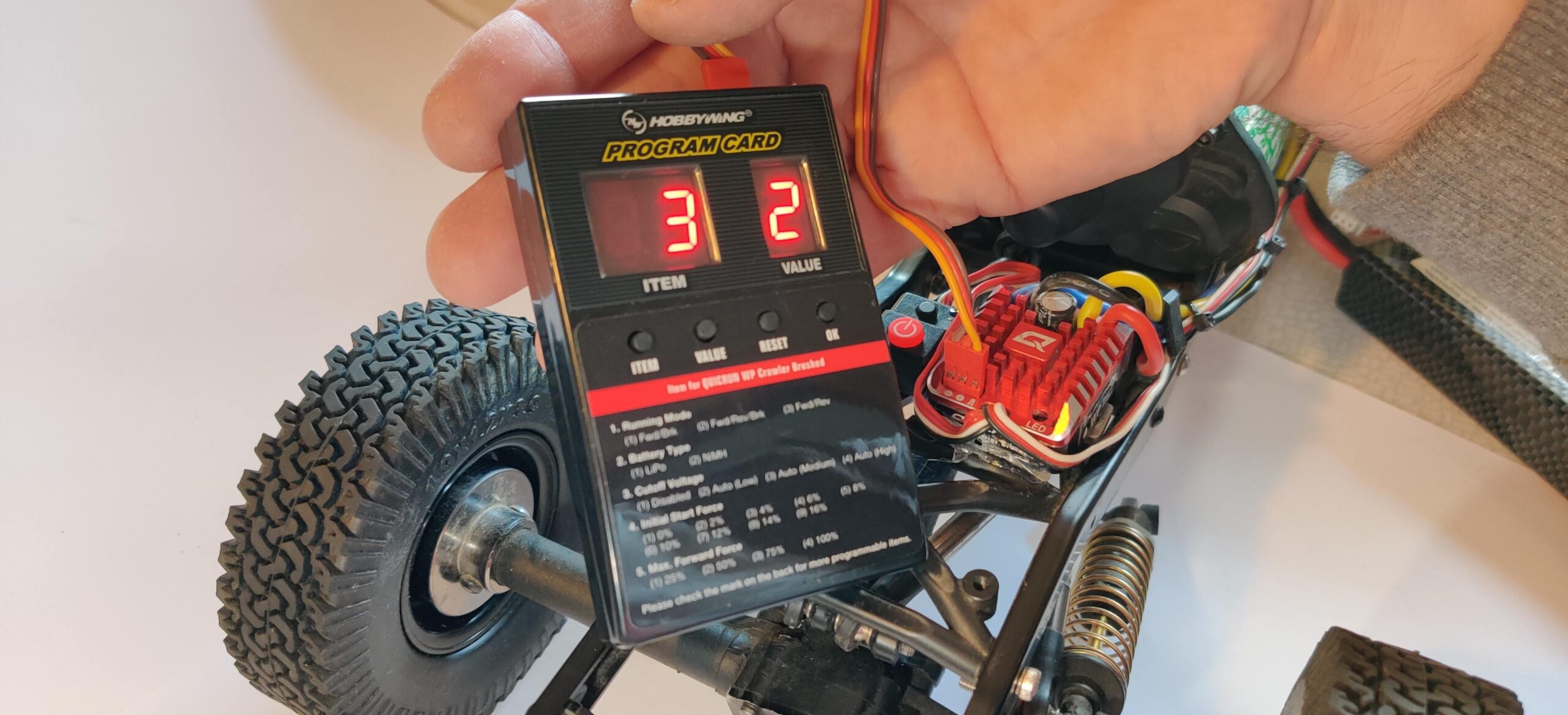
ESC: And I’ve found the perfect pairing for this motor and either of the above servos is the Rhino 80A Brushless AM32 ESC: https://amzn.to/4bBxsp8 (we’re picking the 80A instead of the $14 cheaper 40A because of the 10A vs 3A BEC they come with. The 80A version is the obvious choice).
The previous ESC I was running was the Castle Mamba Micro X ESC, which worked fine too, but it made the outrunner motor quite loud with its lower PWM rate: http://asiate.es/aff?l=208954&i=76070

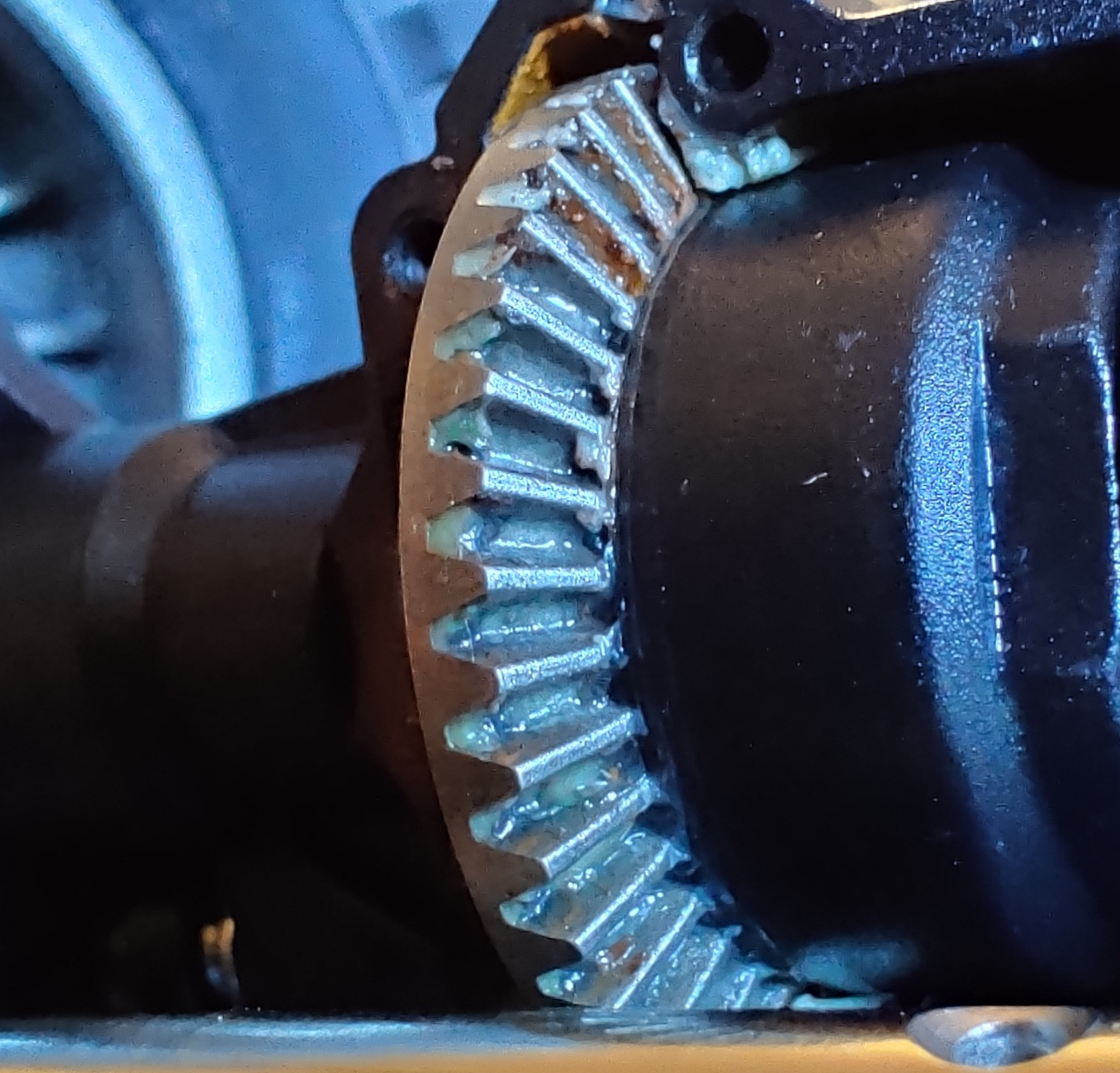
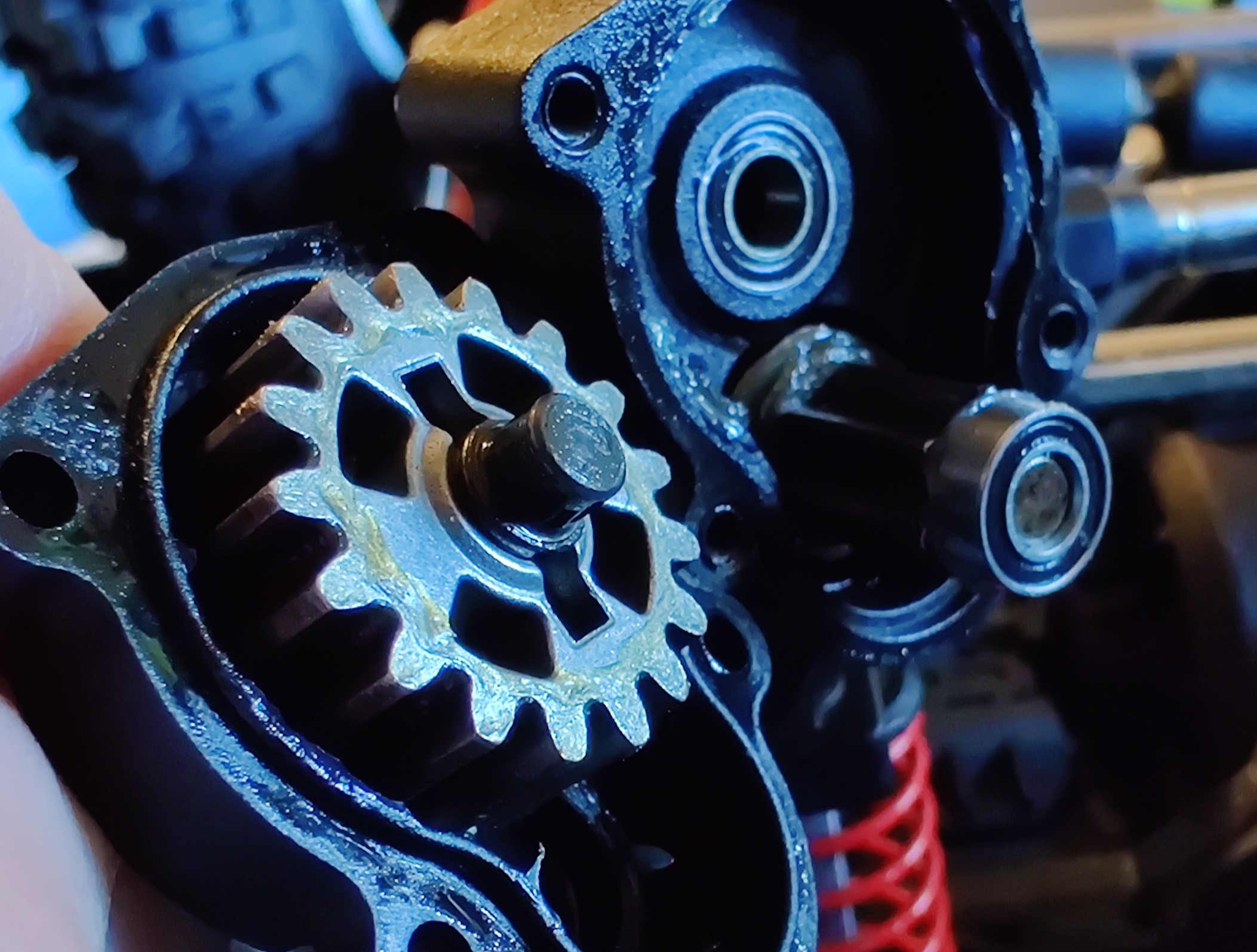
GEARING
There are between 3 and 5 sets of gears to upgrade, depending on what outcome you want. I’ll give you the list and put an * next to the ones I’m running in mine.
*Transmission – Steel Gears: https://rcawd.com/en-au/products/rcawd-axial-utb18-steel-48p-transmission-gear-set-upgrade-parts-for-1-18-capra-trail?ref=mcc
*Portal Gears – Front Overdrive (24/17 – 22.78% O/D): https://rcawd.com/en-au/products/rcawd-utb18-48p-portal-gear-set-24t-17t?ref=mcc&variant=43370775838911
*Portal Gears – Rear Underdrive (27/14 – 10% U/D): https://rcawd.com/en-au/products/rcawd-utb18-48p-portal-gear-set-24t-17t?ref=mcc&variant=43370775806143
Diff Gears – Front Overdrive (31/13 – 6.45% O/D): https://rcawd.com/en-au/products/rcawd-axial-18-1-utb18-upgrades-35t-13t-40crmo4-differential-gears-axi212000?variant=42306402582719
*Diff Gears – Rear Underdrive (35/13 – 5.81% U/D): https://rcawd.com/en-au/products/rcawd-axial-18-1-utb18-upgrades-35t-13t-40crmo4-differential-gears-axi212000?ref=mcc&variant=42306452029631
SHOCKS, LINKS & SHAFTS
SHOCKS: I’m running stock shocks for now, but very soon will swap over to a set from Pricey’s Custom Crawlers. Check out this video to learn more.
LINKS: I’m still running the stock links that come with the UTB18, though I’ve been considering experimenting with shorter front links and longer, bent rear links. I’d have to make these myself, as I’m not aware of any on the market (other than made-to-order by the likes of Pricey’s Custom Crawlers and similar): https://www.facebook.com/profile.php?id=100057753455776
STEERING: However, you will want better steering and drag links than the noodley stock ones: https://rcawd.com/en-au/products/rcawd-axial-utb18-capra-upgrades-aluminum-alloy-steering-link-set-linkage-tie-rod-axi214001?ref=mcc&variant=42175530074303
DRIVE SHAFTS: I also ran the plastic drive shafts for an entire competition season without a problem. I changed to steel unis before the ECCF though, just to be extra careful – breakages suck! https://amzn.to/4bEIqdH
SERVO MOUNT: Another issue I noticed was the servo was wiggling on its plastic mount a bit, so I’ve recently upgraded that to alu: https://rcawd.com/products/rcawd-axial-utb18-capra-upgrades-aluminum-front-servo-linkage-mount-plate-rear-linkage-mount-plate-axi212009?ref=mcc&variant=42175477711039
LINK RISER: Lastly, I am soon going to experiment with this rear link riser, FYI: https://amzn.to/4c0X4LV

WHEELS & TIRES
TIRE OPTIONS: This is an interesting one. There are a few options for tires. I’ve been running RC4WD’s 1.9 4.19” comp pins and have been very happy with them, including with the stock foams.
RC4WD’s site: https://store.rc4wd.com/rc4wd-bully-competition-19-scale-tires.html
RC4WD pin tires: https://amzn.to/3LyvFpK
I haven’t yet tested the new INJORA 1.9 4.19” Comp Pins, though I have them here ready to test soon: https://s.click.aliexpress.com/e/_DdpuUHh
The other tire to mention that was popular at ECCF was the HPI Rover in 1.9”. They’re sub-4” tires, but you can’t argue with Jakey Scholefield’s first place result with them on his PBCCP Vibe chassis (nor Zac Davidson’s third place on the same gear): https://amzn.to/3yJ7dyA
WHEELS: the best wheels to use for this setup are an easy sell. See the video in the list above for how I set them up, and buy them here: https://rcawd.com/en-au/products/rcawd-cyberwheelz-adjustable-weight-1-9-beadlock-wheel-rims-for-1-10-rc-crawler?ref=mcc


EXTRA MASS
This element of setup is somewhat a personal thing. However, if you’re building the rig to be like mine, and critically, with the RC4WD pin tires, I’ve found this setup to work best:
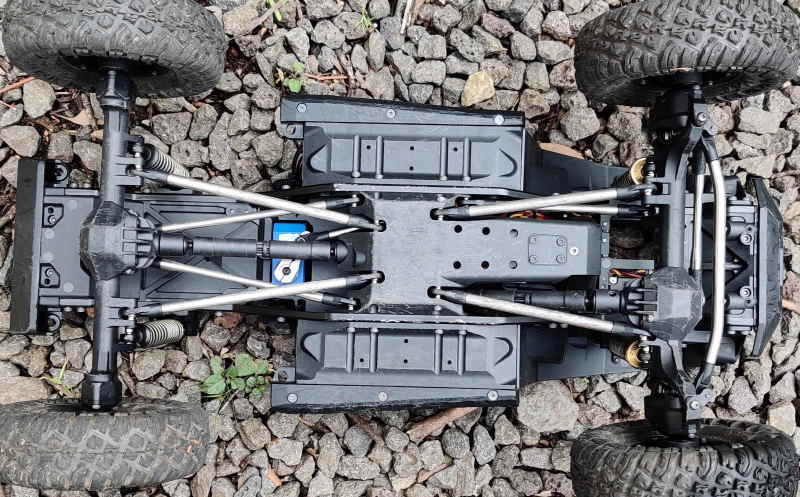
AXLES: stock plastic units with stock shafts
PORTAL OUTERS: https://amzn.to/3R87GAG (both ends)
FRONT PORTAL HANGERS: https://amzn.to/3X00dYf
FRONT PORTAL INNERS (KNUCKLES): https://amzn.to/3X3pRLy
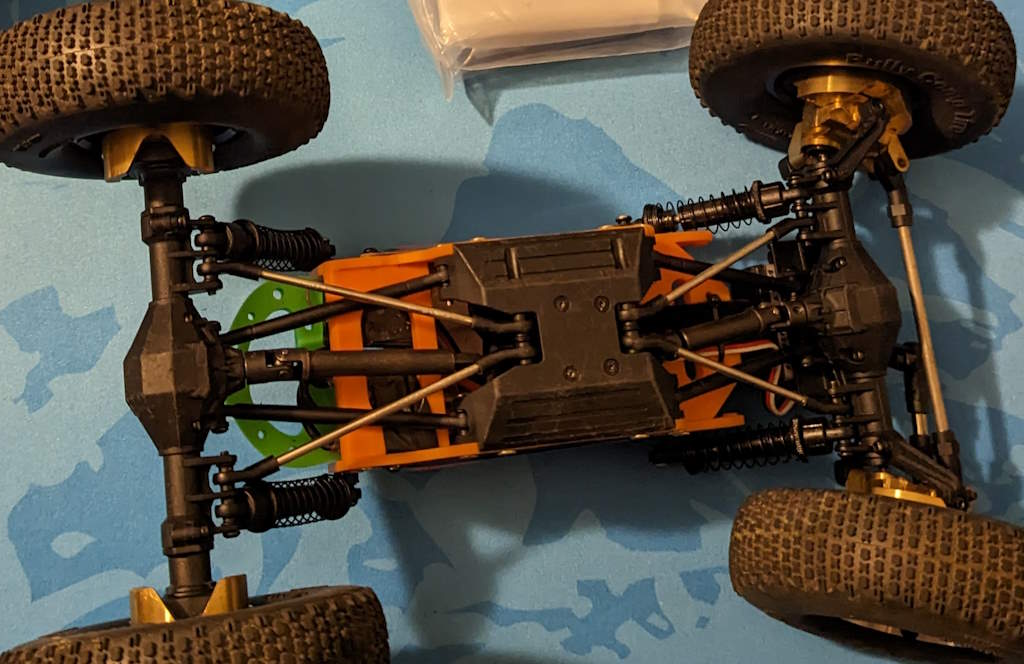
You do end up with a front-heavy rig here. But remember, with the stock geometry (tilted skid aside) that the HT Feather chassis lets you run, in my opinion, the rig does better like this. I found it very predictable and it ascended things well, even with that rear weight. Indeed, the rear weight really helped it on steep descents, allowing the rig to be predictable in all conditions.

BATTERY
The stock UTB18 battery won’t fit in the HT Feather battery tray. But it’s too big anyway, IMO. I recommend these, one for each comp course run: https://amzn.to/4bGJ5em
If you buy something else, be aware that not all 450mah 3S batteries fit. I’ve used these ‘E-Flite Blade 180’ batteries for years and have a bunch of them. They’re quality cells, have a really high charge rate (I’ve done 5C in a pinch at comps, though usually charge them at 2C) and they’ll give you 7 to 11 minutes of hard crawling in a 1/10 rig. Even longer in a brushless HT Feather!

Finishing Up
Now you’ve got everything you need to build a budget champion! Of course, budget is relative and combined, this all adds up to quite a bit. So, if you’re wondering in which priority to do thee mods over time, I’d suggest starting with the (free) HT Feather, the wheels and tires, and maybe even just front portal overdrive gears to begin with. See what you think and go from there.
Happy tinkering and enjoy your time on the rocks with your epic new comp killer!


Craig Veness
RC-TNT
Craig has been into radio control since the 90s and into RC crawling since about 2010, when a Losi MRC started the obsession! Now it's all rocks this and crawl that and upgrade all the things! ...You know how it is, right? Welcome home 🙂




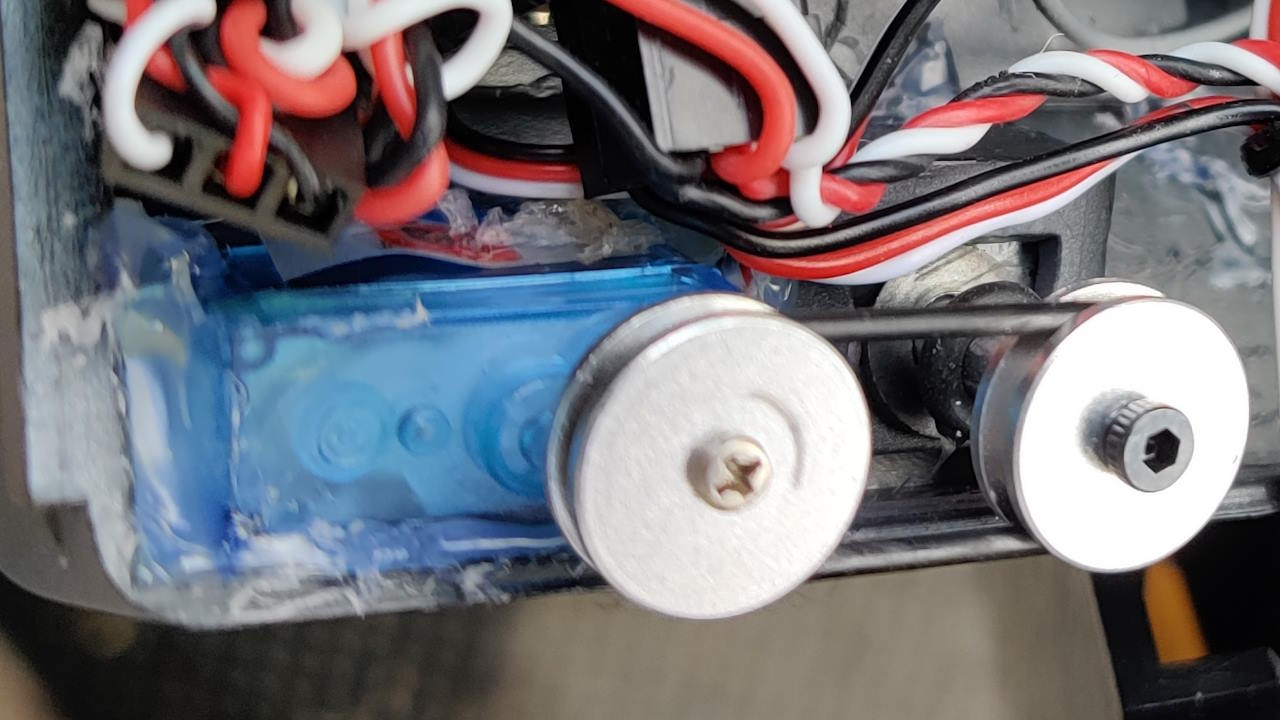

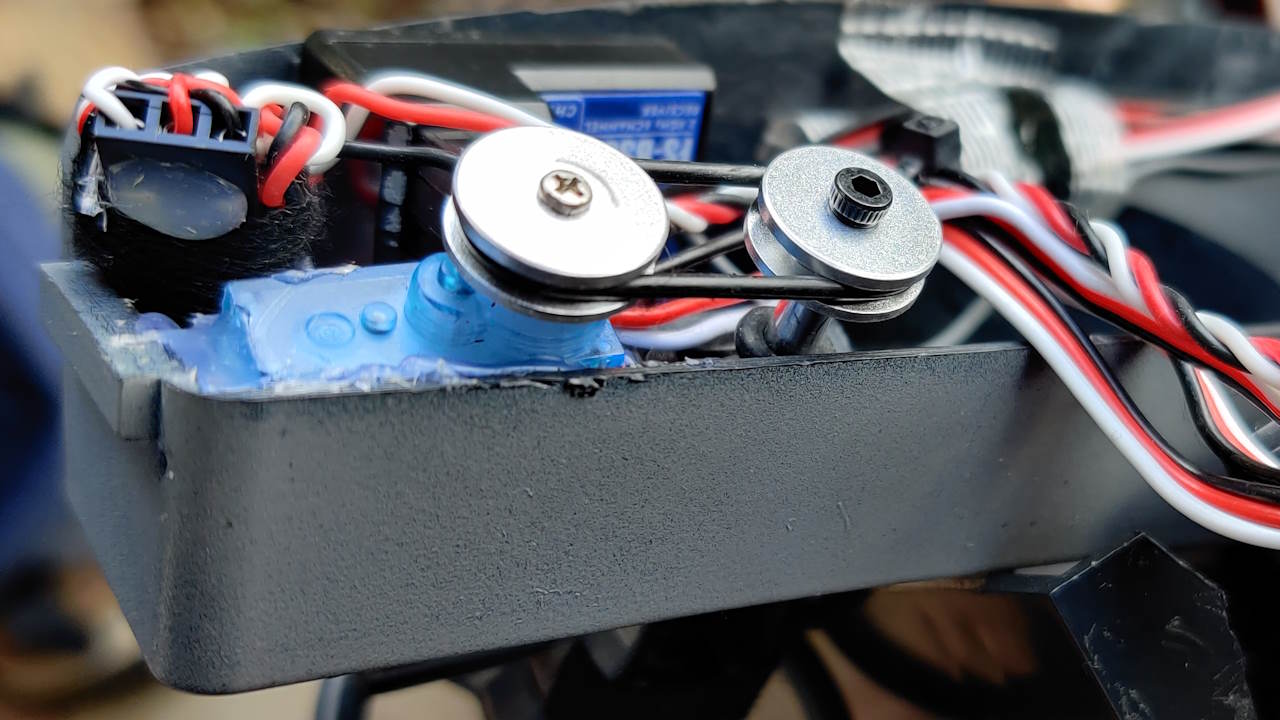



























































Could you give some information how to install the RCRun RUN80 steering wheel servo? I’ve got my kit and for the steering module there are only two alloy pullies and the micro servo. No frame for the servo or other stuff. I hope you could help. Ty from the other end of the rc world (germany) 😉